|
|
|
|
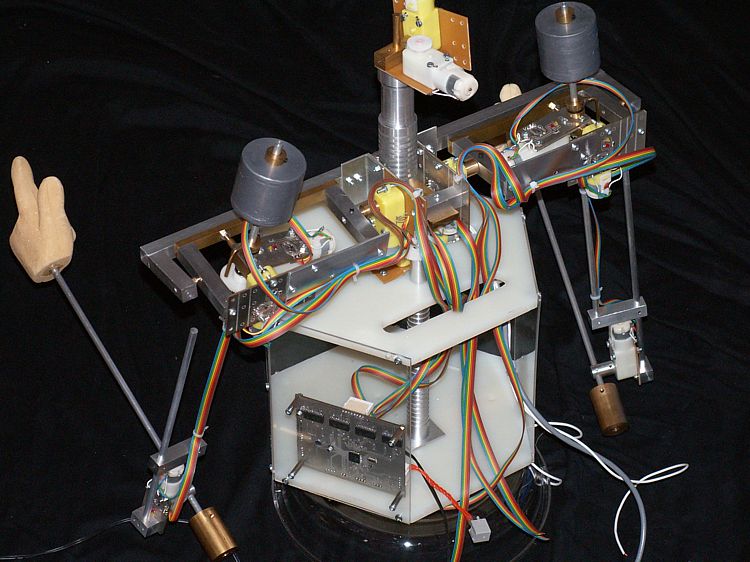
The first step was to design Lucy's limbs to be precisely counterbalanced. A counterbalanced limb requires almost no force to get it moving, and yet has a lot of inertia, leading to a smooth, flutter-free motion. I tried directly coupling a DC motor to a counterweighted limb and it almost worked beautifully - perfectly silent, very smooth and graceful. But a large DC motor gets really hot when it's running almost stalled like that. So then I discovered some nice little plastic gearboxes (from this supplier). They only cost £1.65, which is extremely cheap for gearboxes - a really important issue when you need as many as Lucy does. They come in 120:1 or 200:1 ratios, which means that they have enough oomph to accelerate a heavy (e.g. lead-counterweighted) limb and yet offer relatively low resistance to external pressure. This is really important for two reasons: it allows me to guide Lucy's arms to teach her things, just as we might teach a baby, and it allows her to detect resistance from obstructions. Conventional robot arms are much more open-loop than this, and if they hit an obstruction they either plough right through it or stall without realising that they haven't reached their target. So that Lucy can know where her limbs are in space I butchered each gearbox and added a quadrature optical sensor. This is the type of sensor used in old mechanical mice: each one has two optical switches, slightly offset from each other. When infra-red light is interrupted by a vane, one of the sensors will switch off. When it does so, you can look at the state of the other sensor to determine which way the vane has moved: if the other sensor is also off, the vane must have covered it first, and therefore is moving in one direction. If the other sensor is on, the vane hasn't reached it yet, so it must be moving the other way.
To add the encoder to the gearbox I cut holes in the first non-pinion gearwheel, and fixed the sensor and IR LED to a small PCB bolted to the gearbox. To control the motors I've designed a four-channel H-Bridge driver, controlled by a PIC. The PIC uses pulse-width modulation to supply motor current and reads the encoders to measure position and motion. The PIC code simulates a pair of compliant (springy) muscles, so that the limb can be made to go tense or loose, as well as pulling in one or other direction. One controller board is enough to drive a whole arm/shoulder or neck/head. The controller boards will communicate with a central comms processor via an I2C link. The result isn't as biological as I'd hoped, but I've spent well over a year trying to get biologically plausible actuators working and enough is enough. These are at least a good deal more graceful and quiet than the nasty servos I'd used for Lucy MkI. They don't suffer from twitching or hunting, they are compliant and the resultant motion is really quite graceful. What's more, everything happens nice and slowly, so that I can see what is going on! Now, at long last, I can get on with the rest of Lucy's systems.
|
Copyright © 2004 Cyberlife Research Ltd. |
 Sadly
the
Sadly
the  The
good thing about quatrature encoders is that they are cheap, small, electrically
'clean' and don't need a mechanical connection to the joint. The downside is
that they can only detect relative motion - they don't know the absolute
position of the limb. But this can be solved by driving each limb right to its
end-stop when Lucy is first switched on, and treating this as position zero.
The
good thing about quatrature encoders is that they are cheap, small, electrically
'clean' and don't need a mechanical connection to the joint. The downside is
that they can only detect relative motion - they don't know the absolute
position of the limb. But this can be solved by driving each limb right to its
end-stop when Lucy is first switched on, and treating this as position zero.