|
|
|
|
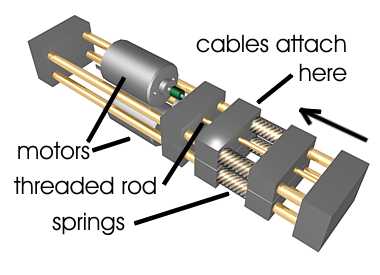
The problem to be solved was how to move a limb quickly and controllably while retaining its pliancy, so that it has similar dynamics to an animal limb and allows the robot to sense obstructions and external forces. Animals have groups of muscles for each joint, often in antagonistic pairs. Tighten both and the joint becomes stiff; tighten one more than the other and it will exert a force; slacken both muscles and the limb will be loose and flexible. The easiest and potentially the cheapest way to approach the problem is to use a single motor and gearbox to push and pull the limb via one or two springs. If there is no external force on the limb then the spring will be slack and both the motor and the limb will 'point the same way'. If an external force is applied, the limb will move relative to the motor. By moving the motor to follow the limb, the joint will appear slack. By rotating the motor in the opposite direction to the limb, a counterbalancing force will be applied. But this has its snags. Imagine such a mechanism being used to hold a head upright. Initially the head and the motor are in their neutral positions and the spring is slack. But this is dynamically unstable - if the head flops even slightly, it will start to fall to one side. The spring, meanwhile, is under low tension, so to counteract the fall and return the head to the upright position the motor must move a long way very quickly to produce a balancing tension on the spring. The chances are that this will go too far and cause the head to flop back the other way, requiring the motor to travel back to neutral and then as far again to the other side. The result will be that the head flops heavily from one side to the other in an uncontrollable oscillation. MIT's Cog robot is famous for playing with a slinky. Given this instability I'm not surprised - it's probably much easier for it to produce the oscillations needed to work a slinky than it is to hold its arms steady! So for Lucy I tried a better solution, using two independent motors, each with a spring. By loosening both springs the joint goes slack; by tightening them both it becomes rigid. Both the angle and the rigidity can be controlled independently.
In practice, though, this was still very twitchy because the motors still have to reverse direction very frequently in order to keep a constant tension. Without heavy damping in the limbs it is still quite unstable. It is also very noisy. But at least it was powerful - strong enough to tear itself to pieces, in fact! So, after wasting a good deal of time designing and building a limb using this method, I decided to abandon it and come up with a better idea. |
Copyright © 2004 Cyberlife Research Ltd. |