The Six Million Dollar
ape
(well, six hundred, anyway)
| Binaural hearing,
with model of the lateral superior olive for phase
discrimination, plus simulation of cochleal hair cells for
frequency detection |
Monocular vision,
with anamorphic visual map (high resolution fovea and decreasing
resolution towards the periphery). Model of retinal ganglion
cells for edge enhancement. |
Assorted touch
sensors, temperature sensors, battery monitors, etc. |
| Actuators with
thirteen degrees of freedom (arms, head, eyes and jaw). Based on
model servomotors but with an extra layer of proprioceptive
feedback and software, resulting in 'virtual muscles'. Nerve
inputs drive virtual extensor and flexor muscle pairs, and the
joints behave compliantly or rigidly, depending on muscle
tension. Proprioceptive data is fed back to the brain as nerve
signals. |
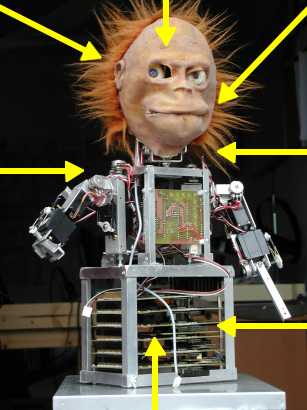 |
Voice system
comprising a simplified model of the vocal tract, with lungs
(volume, flow and pressure), larynx (vocal cords and glottal
muscles) and mouth (resonance determined by jaw position).
Notice that I don't have any
legs! Dad says they'd consume too much current for now and I can
have some when I get older. |
|
Sensorimotor computer system. Specially designed MIMD parallel
computer, based on five 16-bit microcontroller chips (Hitachi
H8S). Each board is identical, with a processor, configurable
logic and 32Kword local memory. The boards communicate with each
other through a shared global memory (256Kword). Each board is
specialised for a particular task via an attached daughterboard.
Tasks include: vision pre-processing, auditory pre-processing,
voice model, muscle control and proprioception, and RS232
communications with the PC. |
|
